W 2007, kiedy debiutowała technologia Google Maps Street View, fotografia cyfrowa, w tym fotografia 360°, miała już za sobą długie lata rozwoju. Format QuickTime VR, przeznaczony właśnie do wyświetlania fotografii 360°, został stworzony przez Apple już w pierwszej połowie lat dziewięćdziesiątych i zadebiutował publicznie w 1995.
O ile rozwój technologii pozwolił na znaczne podniesienie jakości obrazu (rozdzielczości czy zakresu tonów) rejestrowanego przez aparaty cyfrowe, o tyle technika przygotowania tego rodzaju fotografii nie zmieniła się od momentu pierwszego jej użycia — gotowe zdjęcia 360° są rezultatem zszywania wielu (od trzech do kilkuset) fotografii wykonanych z dokładnie tej samej pozycji źrenicy aparatu fotograficznego, w różnych jego orientacjach.
W tym kontekście, wprowadzane od 2013 niewielkie kamery fotografujące całą sferę 360° za jednym kliknięciem, oznaczały niemałą rewolucję. Dzięki wykorzystaniu dwu obiektywów jednocześnie, cały materiał potrzebny do zszycia obrazu sferycznego jest rejestrowany w tym samym momencie. Ta rewolucja umożliwiła też rejestrowanie video 360° za pomocą pojedynczego urządzenia (zamiast używanych dotąd konstrukcji zbudowanych z czterech do sześciu kamer zorientowanych w różnych kierunkach)
Naturalnie, dwa obiektywy nie mogą istnieć w tym samym czasie w tym samym miejscu, dlatego istota działania jednostrzałowych kamer 360° oparta jest na podwójnym kompromisie:
- Paralaksa i problem szwu
— W odróżnieniu od aparatu umieszczonego na głowicy panoramicznej, fotografującego każdą stronę świata oddzielnie z dokładnie tego samego miejsca, w tym wypadku dwie strony świata fotografowane są jednocześnie, z użyciem dwu oddalonych od siebie obiektywów — w finalnym zdjęciu pozostaje zatem szew łączący dwie połówki obrazu, wzdłuż którego będą występować artefakty, takie jak zniekształcenia czy podwójny obraz.Dodatkowo, w przypadku kamer o asymetrycznej konstrukcji, jak GoPro Fusion oraz GoPro MAX, oś optyczna nie zostaje zachowana dla dwu połówek pola widzenia, zatem np. przedmioty umieszczone w jednej połowie symetrycznego nie będą w finalnym zdjęciu wypadać na wprost swoich odpowiedników z drugiej połowy.
- Sensor bardzo niewielkich rozmiarów
— Aby zminimalizować paralaksę i problemy z nią związane, oba obiektywy oraz ich sensory umieszczone są fizycznie bardzo blisko siebie, co znacznie ogranicza rozmiary, jakie mogą przybrać. Jak w każdej innej gałęzi fotografii, obiektyw o niewielkich rozmiarach połączony z jeszcze mniejszym sensorem oznacza bardzo ograniczoną rozdzielczość obrazu, niewielką rozpiętość tonalną (ciemne obszary sceny pozostają niedoświetlone; jasne zostają przepalone) oraz wysoki poziom szumu.
Profesjonalny sprzęt do fotografii 360°, z racji fotografowania czterech stron świata oddzielnie, nie musi chodzić na podobne ustępstwa i dzięki temu oferuje znacznie wyższy pułap jakości obrazu.
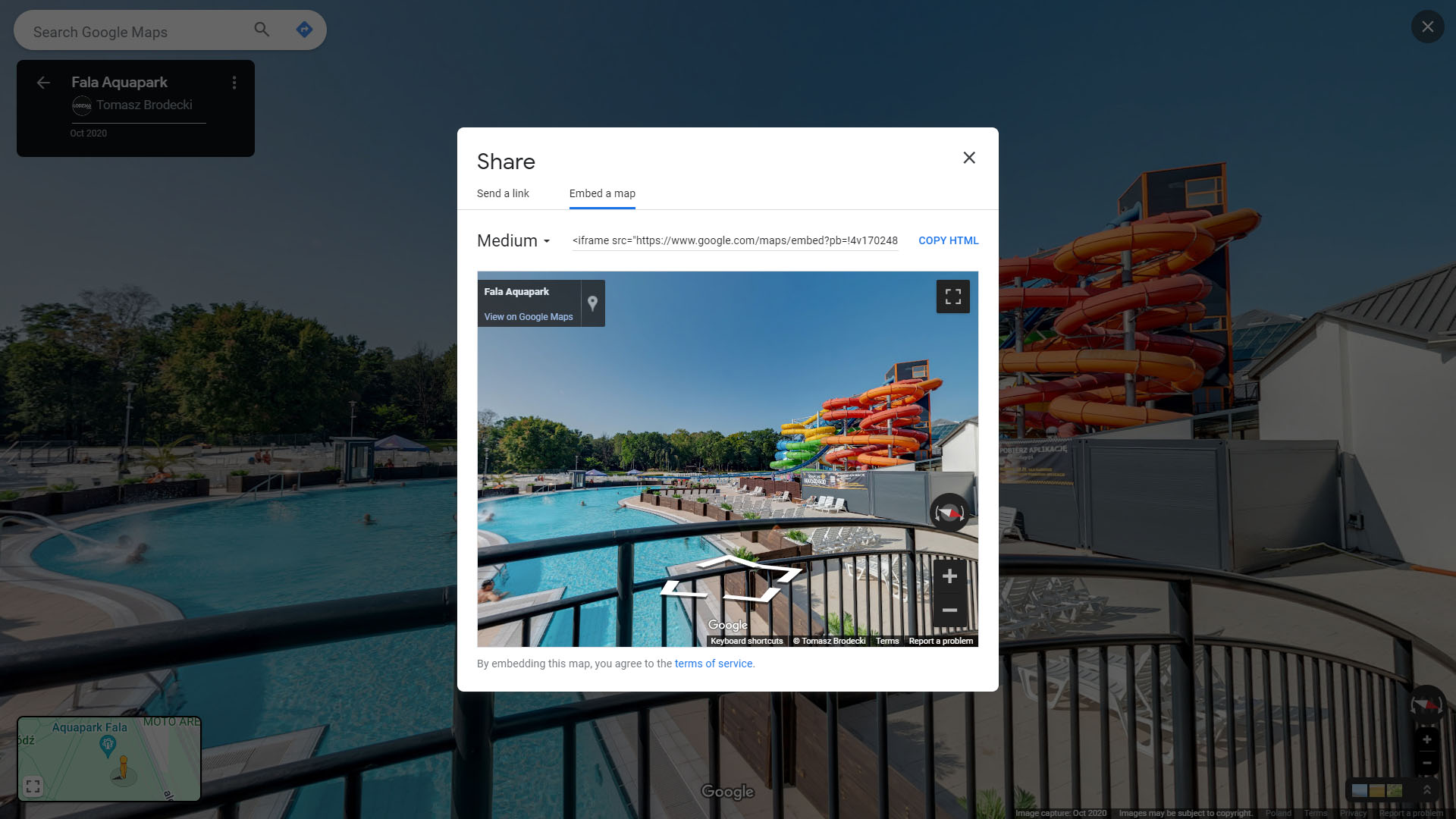
Poniżej — przykład jakości uzyskanej za pomocą naszego sprzętu do fotografii 360°:
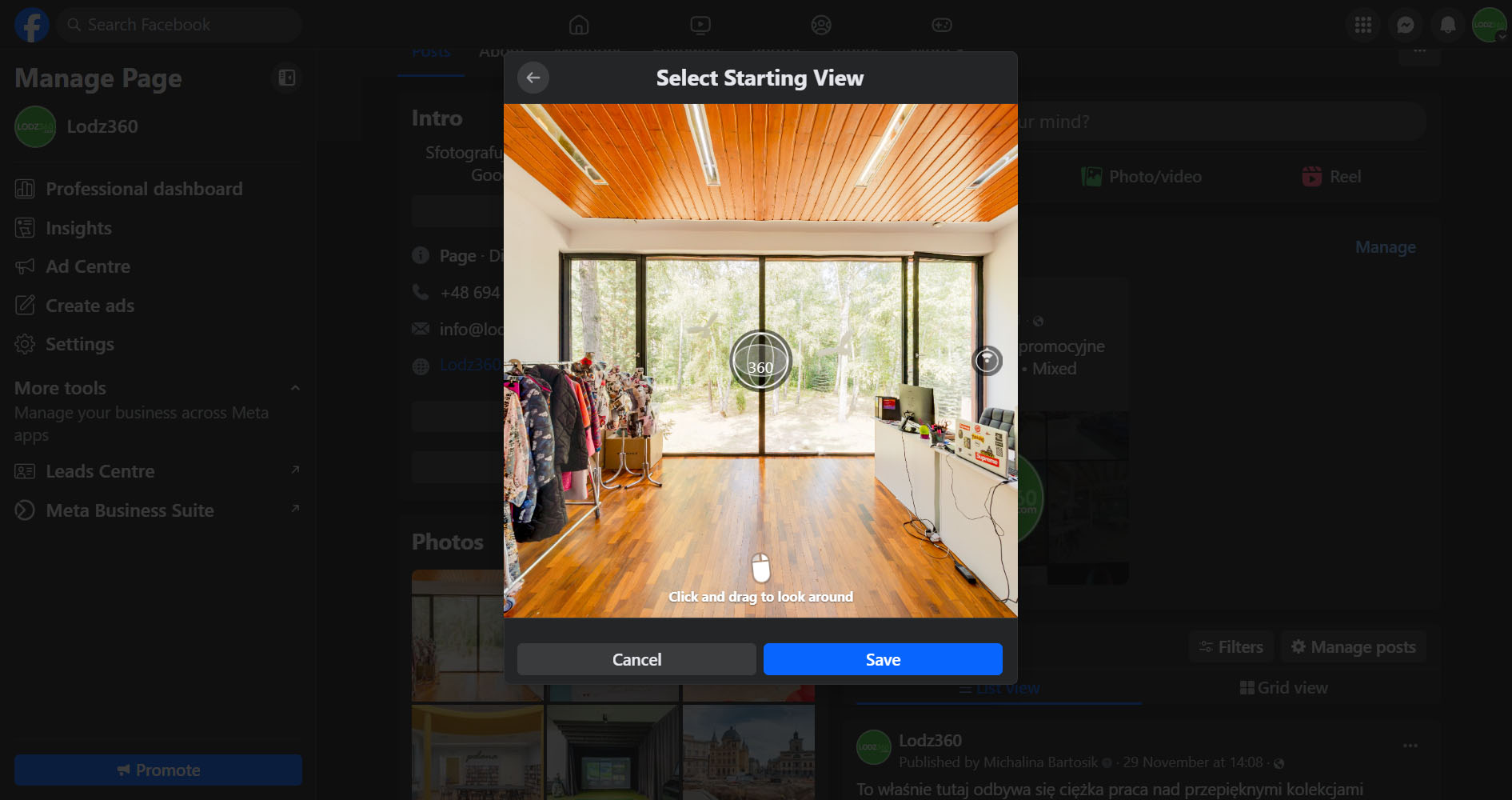
oraz, dla porównania — zdjęcie z niewielkiej kamery 360° użytej w tym samym budynku:
O ile zatem dwuobiektywowe kamery 360° są bardzo dobrym wyborem do nagrywania filmów 360°, o tyle oferowana przez nie jakość fotografii 360° jest w naszej opinii zbyt niska, by służyć do promowania tych wnętrz naszych klientów, w których fizycznie możemy użyć sprzętu wyższej jakości. Wyjątkiem pozostają miejsca trudno dostępne dla fizycznych gabarytów “pełnego” sprzętu fotograficznego.